2 geometria analitica apuntes.pdf
Vista previa de texto
66
CAPÍTULO 1. EL PLANO EUCLIDIANO
Suma de ángulos
Si ya definimos ángulo entre vectores, resulta natural definir el ángulo entre dos
rectas como el ángulo entre sus vectores direccionales. Pero hay una
ambiguedad pues podemos escoger direcciones opuestas para una misma
recta. Esta ambiguedad equivale a que dos rectas que se intersectan
definen cuatro sectores o “ángulos” que se agrupan naturalmente en
dos parejas opuestas por el vértice que miden lo mismo; y estos dos
¯
ángulos son complementarios, es decir, suman π. No vale la pena entrar
® ®
en los detalles formales de esto usando vectores direccionales pues sólo
¯
se confunde lo obvio, que desde muy temprana edad sabemos. Pero
si podemos delinear rapidamente la demostración de que la suma de
los ángulos de un triángulo siempre es π, que para Euclides tuvo que ser axioma
(disfrazado o no).
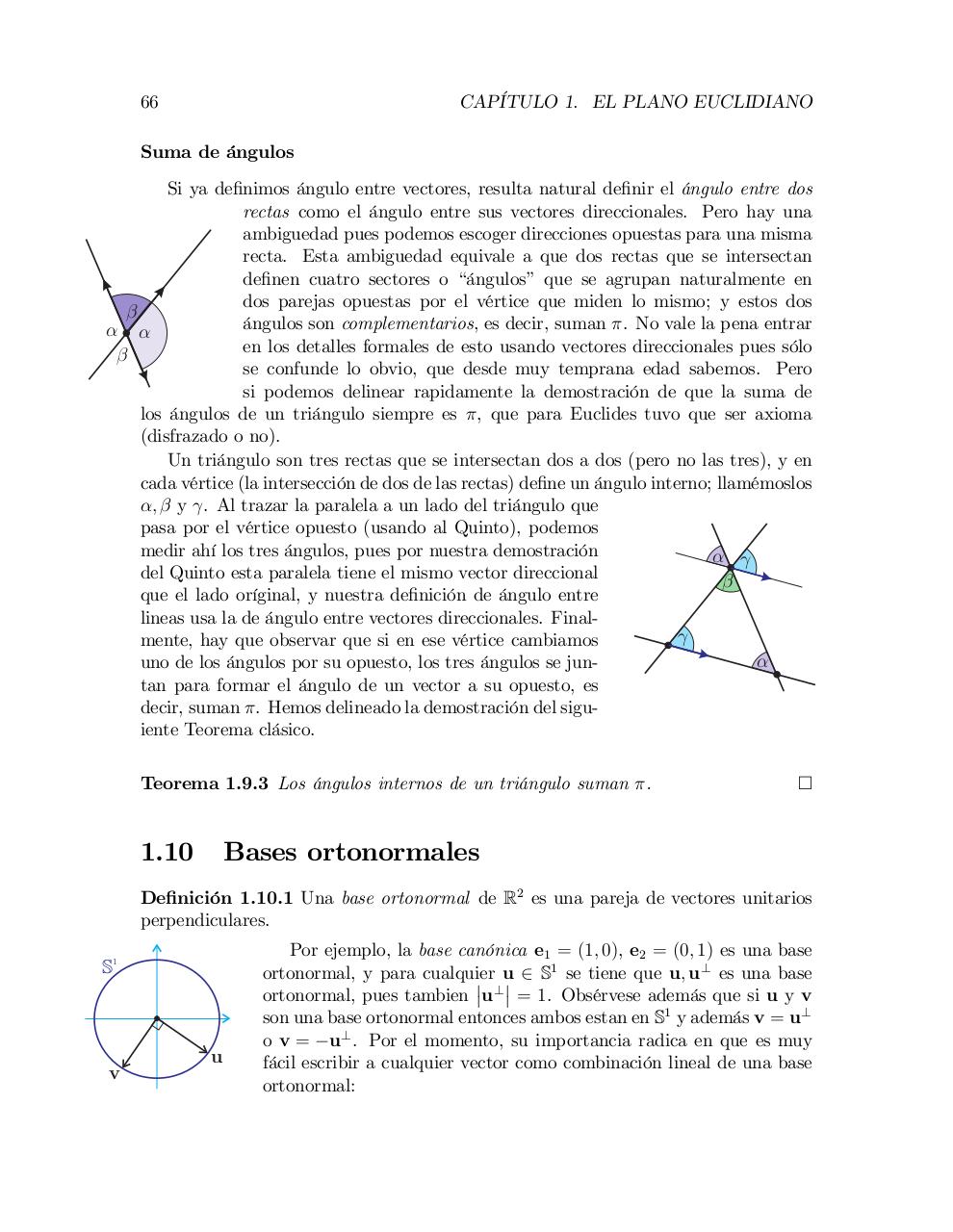
Un triángulo son tres rectas que se intersectan dos a dos (pero no las tres), y en
cada vértice (la intersección de dos de las rectas) define un ángulo interno; llamémoslos
α, β y γ. Al trazar la paralela a un lado del triángulo que
pasa por el vértice opuesto (usando al Quinto), podemos
medir ahí los tres ángulos, pues por nuestra demostración
® °
del Quinto esta paralela tiene el mismo vector direccional
¯
que el lado oríginal, y nuestra definición de ángulo entre
lineas usa la de ángulo entre vectores direccionales. Final°
mente, hay que observar que si en ese vértice cambiamos
®
uno de los ángulos por su opuesto, los tres ángulos se juntan para formar el ángulo de un vector a su opuesto, es
decir, suman π. Hemos delineado la demostración del siguiente Teorema clásico.
Teorema 1.9.3 Los ángulos internos de un triángulo suman π.
1.10
¤
Bases ortonormales
Definición 1.10.1 Una base ortonormal de R2 es una pareja de vectores unitarios
perpendiculares.
S1
v
u
Por ejemplo, la base canónica e1 = (1, 0), e2 = (0, 1) es una base
1
⊥
ortonormal, y para cualquier
¯ ⊥u
¯ ∈ S se tiene que u, u es una base
ortonormal, pues tambien ¯u ¯ = 1. Obsérvese además que si u y v
son una base ortonormal entonces ambos estan en S1 y además v = u⊥
o v = −u⊥ . Por el momento, su importancia radica en que es muy
fácil escribir a cualquier vector como combinación lineal de una base
ortonormal: