2 geometria analitica apuntes.pdf
Vista previa de texto
56
CAPÍTULO 1. EL PLANO EUCLIDIANO
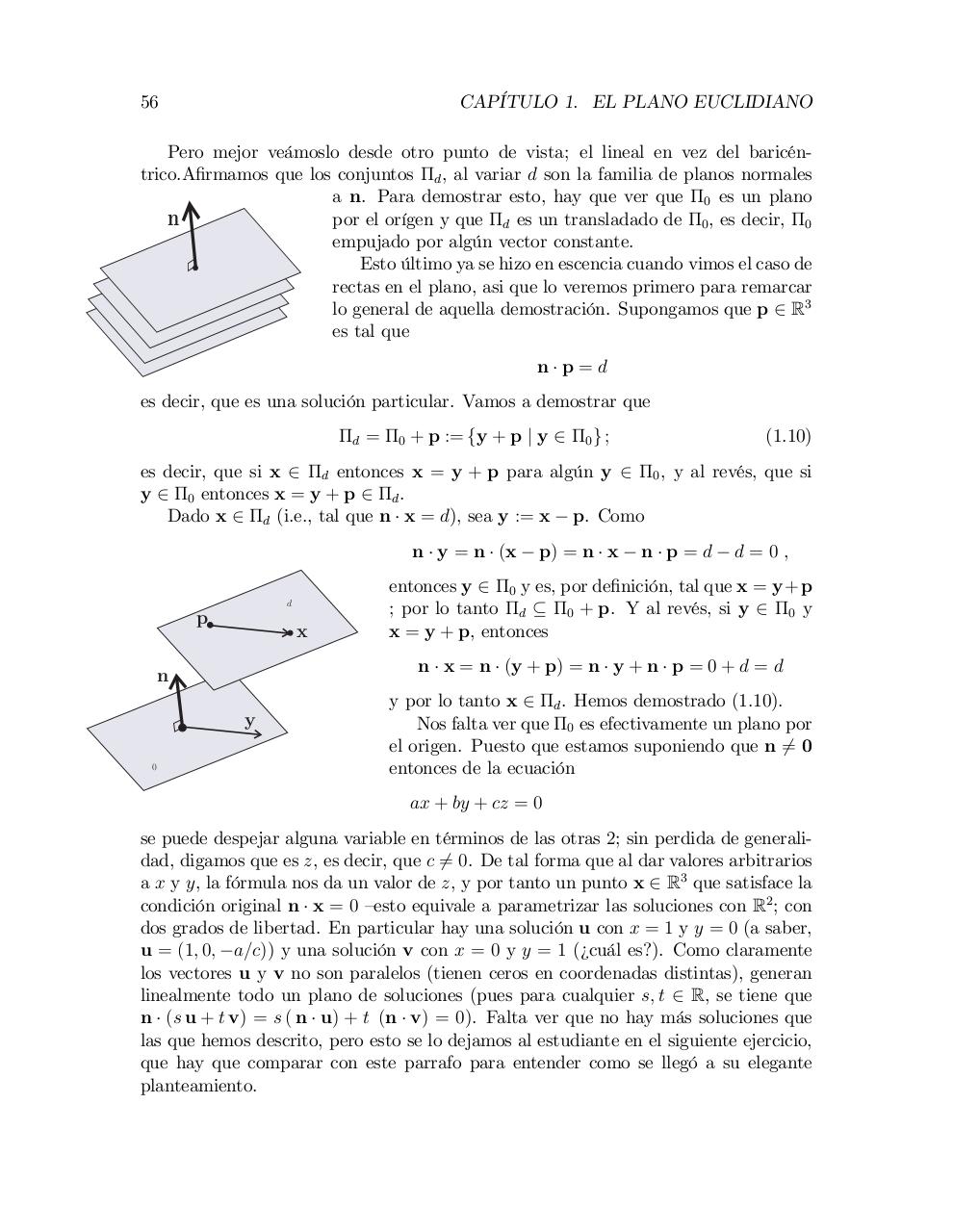
Pero mejor veámoslo desde otro punto de vista; el lineal en vez del baricéntrico.Afirmamos que los conjuntos Πd , al variar d son la familia de planos normales
a n. Para demostrar esto, hay que ver que Π0 es un plano
por el orígen y que Πd es un transladado de Π0 , es decir, Π0
n
empujado por algún vector constante.
Esto último ya se hizo en escencia cuando vimos el caso de
rectas en el plano, asi que lo veremos primero para remarcar
lo general de aquella demostración. Supongamos que p ∈ R3
es tal que
n·p=d
es decir, que es una solución particular. Vamos a demostrar que
Πd = Π0 + p := {y + p | y ∈ Π0 } ;
(1.10)
es decir, que si x ∈ Πd entonces x = y + p para algún y ∈ Π0 , y al revés, que si
y ∈ Π0 entonces x = y + p ∈ Πd .
Dado x ∈ Πd (i.e., tal que n · x = d), sea y := x − p. Como
n · y = n · (x − p) = n · x − n · p = d − d = 0 ,
d
p
x
n
n · x = n · (y + p) = n · y + n · p = 0 + d = d
n
y
0
entonces y ∈ Π0 y es, por definición, tal que x = y+p
; por lo tanto Πd ⊆ Π0 + p. Y al revés, si y ∈ Π0 y
x = y + p, entonces
y por lo tanto x ∈ Πd . Hemos demostrado (1.10).
Nos falta ver que Π0 es efectivamente un plano por
el origen. Puesto que estamos suponiendo que n 6= 0
entonces de la ecuación
ax + by + cz = 0
se puede despejar alguna variable en términos de las otras 2; sin perdida de generalidad, digamos que es z, es decir, que c 6= 0. De tal forma que al dar valores arbitrarios
a x y y, la fórmula nos da un valor de z, y por tanto un punto x ∈ R3 que satisface la
condición original n · x = 0 —esto equivale a parametrizar las soluciones con R2 ; con
dos grados de libertad. En particular hay una solución u con x = 1 y y = 0 (a saber,
u = (1, 0, −a/c)) y una solución v con x = 0 y y = 1 (¿cuál es?). Como claramente
los vectores u y v no son paralelos (tienen ceros en coordenadas distintas), generan
linealmente todo un plano de soluciones (pues para cualquier s, t ∈ R, se tiene que
n · (s u + t v) = s ( n · u) + t (n · v) = 0). Falta ver que no hay más soluciones que
las que hemos descrito, pero esto se lo dejamos al estudiante en el siguiente ejercicio,
que hay que comparar con este parrafo para entender como se llegó a su elegante
planteamiento.