2 geometria analitica apuntes.pdf
Vista previa de texto
32
CAPÍTULO 1. EL PLANO EUCLIDIANO
Definición lineal
Emocionado el autor por su demostración del teorema de medianas usando coordenadas baricéntricas, se siguió de largo y definió planos en el espacio de una manera
quizá no muy intuitiva. Que quede entonces la sección anterior como ejercicio en
la manipulación de combinaciones de vectores, si no quedo muy clara puede releerse
despues de esta. Pero conviene recapitular para definir planos de otra manera, para
aclarar la definición y así dejarnos la tarea de demostrar una equivalencia de dos
definiciones.
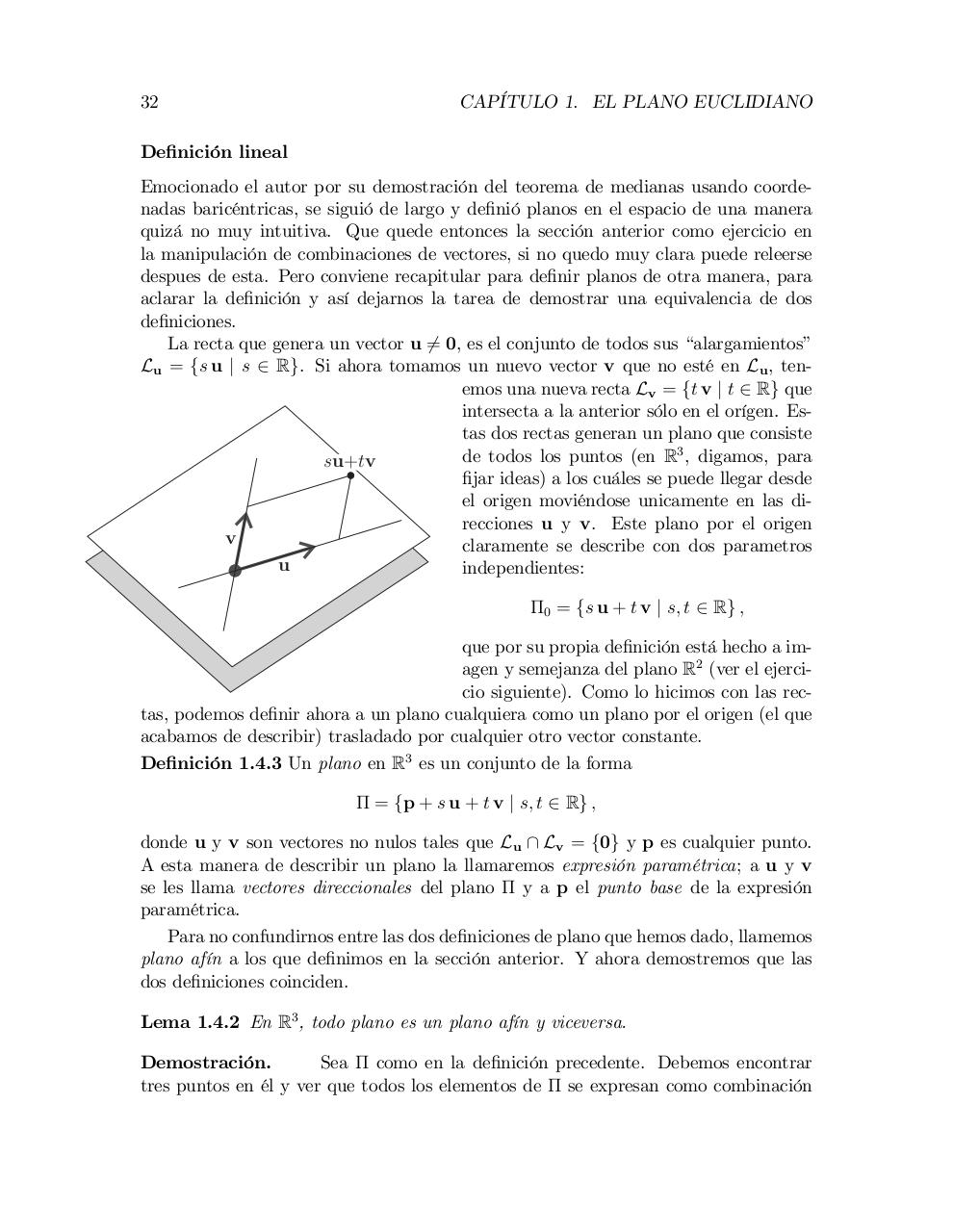
La recta que genera un vector u 6= 0, es el conjunto de todos sus “alargamientos”
Lu = {s u | s ∈ R}. Si ahora tomamos un nuevo vector v que no esté en Lu , tenemos una nueva recta Lv = {t v | t ∈ R} que
intersecta a la anterior sólo en el orígen. Estas dos rectas generan un plano que consiste
de todos los puntos (en R3 , digamos, para
su+tv
fijar ideas) a los cuáles se puede llegar desde
el origen moviéndose unicamente en las direcciones u y v. Este plano por el origen
v
claramente se describe con dos parametros
u
independientes:
Π0 = {s u + t v | s, t ∈ R} ,
que por su propia definición está hecho a imagen y semejanza del plano R2 (ver el ejercicio siguiente). Como lo hicimos con las rectas, podemos definir ahora a un plano cualquiera como un plano por el origen (el que
acabamos de describir) trasladado por cualquier otro vector constante.
Definición 1.4.3 Un plano en R3 es un conjunto de la forma
Π = {p + s u + t v | s, t ∈ R} ,
donde u y v son vectores no nulos tales que Lu ∩ Lv = {0} y p es cualquier punto.
A esta manera de describir un plano la llamaremos expresión paramétrica; a u y v
se les llama vectores direccionales del plano Π y a p el punto base de la expresión
paramétrica.
Para no confundirnos entre las dos definiciones de plano que hemos dado, llamemos
plano afín a los que definimos en la sección anterior. Y ahora demostremos que las
dos definiciones coinciden.
Lema 1.4.2 En R3 , todo plano es un plano afín y viceversa.
Demostración.
Sea Π como en la definición precedente. Debemos encontrar
tres puntos en él y ver que todos los elementos de Π se expresan como combinación